① Keypoint Localization &Filtering
- Now we have much less pointsthan pixels
- However, still lots of points(~1000s)
ü With only pixel-accuracy at best
ü At higher scales, this corresponds to several pixels in base image
ü And this includes many bad points
☞ 지금까지 우리는 스케일 스페이스의 다양한 후보점을 가지고 있다.
그러나 여전히 점들이 많다. 여기에는 필요없는 잡음이나 에러점들이 많다.
그래서 우리는 최고의정밀도 있는 점을 가려내야한다.
더높은 스케일은 기초 이미지의 픽셀에 대응한다
그리고 이것들은 나쁜점들은 포함한다.
자세한 건 (Brown & Lowe 2002) 논문을 꼭 읽어 보아라
② Keypoint Localization
- The problem

- Solution
ü Take Taylor series expansion
ü Minimize to get true location of extrema

☞ 브라운의 논문에서 첫번째 문제점으로 극값을 추출해야하지만 샘플링으로 인하여
위의 그림과 같이 정확한 극점이 아닌 주변 극점이 검출된다는 것이다.
해결책으로는 LowContrast 식을 제안하여 이를 해결한다.
자세한건 극점피팅에 대해 나중에 설명하고
이 식을 직접 계산하기엔 복잡하기에 테일러 공식을 이용하여 계산한 후
아래로 넘어가자
③ Keypoint Filtering – LowContrast
-
-
☞ 위의 식을 통하여 임계값 0.03 보다 작은 점을 제거하게 된다.
이렇게 대조로 나쁜점을 제거한다.

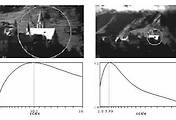
④ Keypoint Filtering – Edges
- Reject points with strong edge responsein one direction only
- Like Harris – using Trace and Determinant of Hessian

- To check if ratio of principalcurvatures is below some threshold, r, check :

- r = 10
- Only 20 floating pointsoperations to test each keypoints
☞ 한방향으로 응답이 강한 에지는 제거 한다
해리스코너를 검출하는 방법 처럼 ( 트레이스와 헤시안 행렬값을 이용하여)
만약주요 곡선의 비율을 확인하려면 아래 식과 같이 임계값과 r값을 확인한다
r = 10 이고 각 추출점을 확인하려면 움직이는 20개의 점을 계산한다
그러면 2단계 과정인 Key Point Localization & Filtering 위의 그림과 같이 얻고 난 후 끝나게 된다.

'[Public] 신호처리 > 영상 객체검출' 카테고리의 다른 글
| [Computer Vision] #1 컴퓨터 비젼 이란? (3) | 2012.05.24 |
|---|---|
| [Corner Detection] #1 Define of Corner (6) | 2012.05.23 |
| [SIFT] 1. Scale-Space Extrema Detection (0) | 2010.04.07 |
| [SIFT] SIFT 를 이해하기 앞서 (0) | 2010.04.04 |
| [SIFT] 컨볼루션의 성질 (0) | 2010.03.17 |